Klimov Tarpen Robotic Observatory
KTRO — Klimov Tarpen Robotic Observatory
“Tarpen” refers to the historical name associated with the Tushino area.
A compact robotic observatory designed to study measurement stability,
reproducibility, and instrument response under real observational conditions.
KTRO is a semi-automated observational facility developed within the
Psi–Continuum Experimental Program.
Its purpose is not large-scale survey astronomy or object discovery,
but controlled and repeatable measurements.
KTRO is conceived as a controlled platform for photometric stability studies,
focused on long-term reproducibility, instrumental consistency,
and methodological robustness.
KTRO is not about equipment.
It is about creating a stable observational reference system.
Project Overview
KTRO is being developed as a compact robotic observatory for
controlled, repeatable astronomical measurements.
The project is oriented toward:
- differential photometry
- long-term instrumental stability
- reproducible observing routines
- cross-night consistency testing
- pipeline-level methodological validation
Rather than maximizing volume, KTRO is built to maximize
control, traceability, and repeatability.
Why this matters
KTRO is not built to discover new objects — it is built to understand how measurements behave.
Measurement stability
Modern astrophysics relies on high-precision datasets, yet
the stability of measurement systems themselves is rarely
tested under controlled, repeatable conditions.
Reproducibility
KTRO provides a platform where the same observations can be
repeated over months and seasons, allowing direct evaluation
of reproducibility and systematic drift.
Instrument response
By operating a fixed, version-controlled pipeline, KTRO
isolates how instruments and processing chains respond
over time under identical conditions.
Methodological discipline
The project emphasizes controlled procedures over data volume,
focusing on how reliable conclusions emerge from stable
measurement systems.
Scientific Function within the Psi–Continuum Program
The Psi–Continuum framework operates at two scales:
- large-scale cosmological background diagnostics
- small-scale controlled observational stability tests
KTRO serves as a controlled experimental testbed for
measurement-system behavior.
While cosmological analyses rely on public datasets
(SN Ia, BAO, H(z)), KTRO allows controlled repetition
of measurements under known instrumental conditions.
The objective is methodological:
- evaluate differential photometric stability
- quantify long-term instrumental drift
- test cross-epoch reproducibility
- characterize noise structure under repeated measurements
- validate pipeline-level robustness
The guiding principle is consistent across scales:
Measurement systems must demonstrate stability, response coherence,
and controlled deviations.
Observational Scope
Primary targets:
- RR Lyrae stars
- Classical Cepheids
- stable reference stars for baseline control
Observational protocol emphasizes:
- differential photometry
- standard calibration frames (bias, dark, flat)
- fixed and version-controlled reduction pipeline
- archivable and reproducible output formats
- cross-night consistency monitoring
The objective is reproducibility rather than discovery.
Instrumentation
Mount
- MaxVision EXOS-2 (equatorial mount)✔
- OnStep V4 Pro controller✔
Optical System
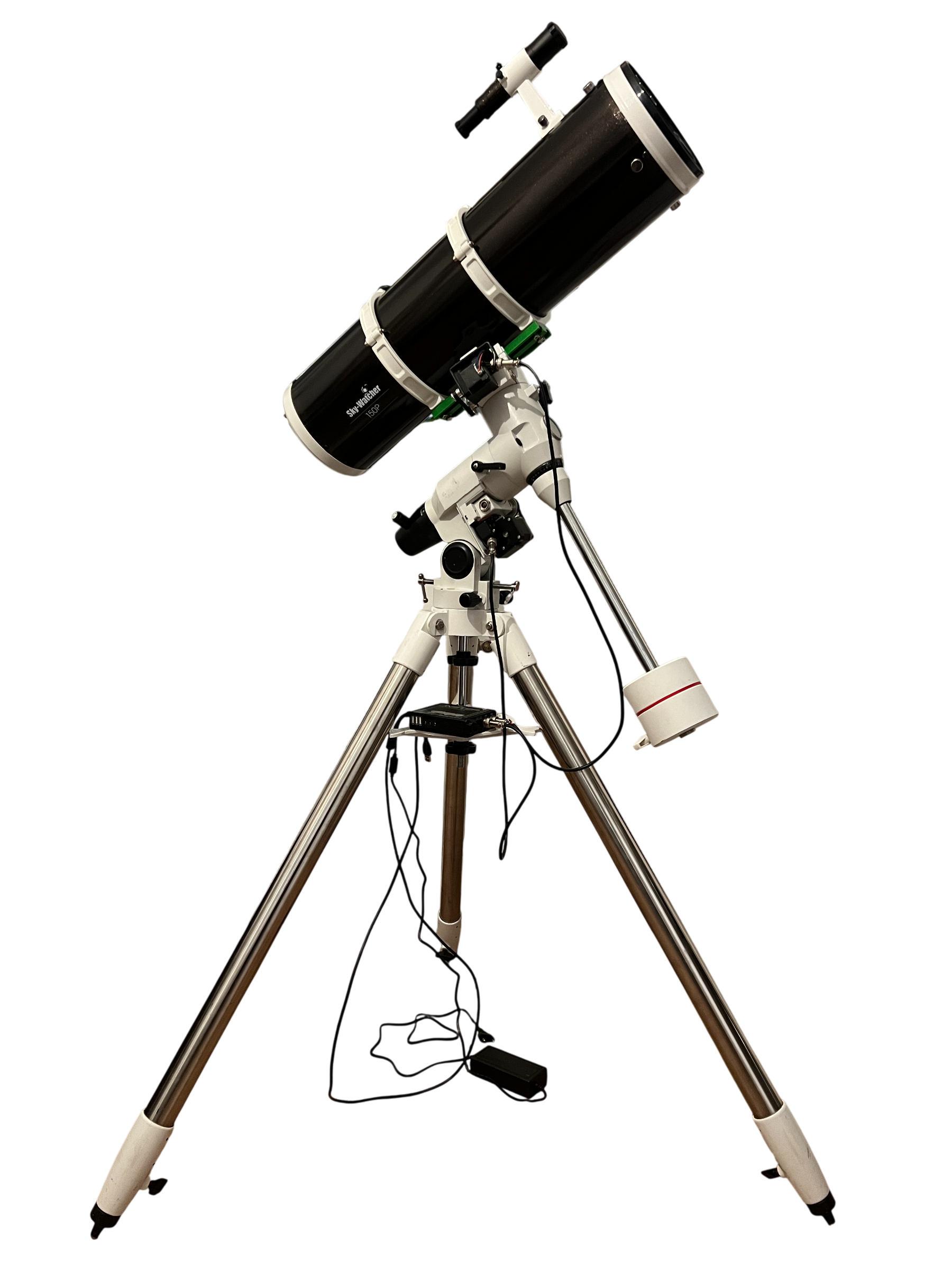
- Sky-Watcher BKP 150/750 (Newtonian, f/5)✔
Planned Imaging Chain
- Baader MPCC Mark III coma corrector
- ZWO ASI533MM Pro (monochrome CMOS)
- ZWO EFW 2” filter wheel
- UBVRI Bessel filter set (V2)
- ZWO EAFN autofocus system
- Mini PC for observatory-side control
- Lunatico AAG CloudWatcher
The system is designed for mechanical stability,
repeatable pointing, and progressive automation.
Development Phases
Phase 1 — Mechanical validation (completed)
Mount assembly, polar alignment testing, tracking validation.
Phase 2 — Semi-automation (ongoing)
Repeatable pointing routines, motor control refinement,
pipeline integration.
Phase 3 — Long-term monitoring mode (planned)
Multi-month monitoring programs, cross-season stability checks,
public data documentation where feasible.
Current Project Status
KTRO is currently in Phase 2 (semi-automation development).
At this stage, the project has already achieved:
- assembled and operational core mount/optical platform
- initial tracking and alignment validation
- defined reduction workflow
- baseline observatory platform established for photometric work
The next milestone is transition from a semi-manual setup
to a stable repeatable monitoring system suitable for
long-term observational campaigns.
This transition depends not only on software and methodology,
but also on completing the hardware chain required for
fully reliable operation.
KTRO Build Status
KTRO is being assembled as a compact robotic observatory for
reproducible photometric monitoring. The readiness level below
is estimated directly from the number of completed core hardware modules.
Overall hardware readiness
2 of 9 key system modules are already deployed.
The remaining modules are currently in progress.
22% complete — based on completed hardware cards
Estimated full operational readiness after hardware completion: ~85–90%
Completed
Sky-Watcher Explorer 150P
Primary optical tube already deployed as the telescope base
of the KTRO system.
Completed
Completed
MaxVision EXOS-2 + OnStep V4 Pro
Equatorial mount and controller platform already operational
as the mechanical base of the observatory.
Completed
In progress
ZWO ASI533MM Pro
Primary monochrome scientific camera for differential photometry,
repeatable measurements, and long-term stability analysis.
In progress
ZWO EFW 2" Filter Wheel
Automated filter switching for controlled multi-band observations
and a reproducible observing workflow.
In progress
Baader UBVRI Bessel Filter Set (V2)
Standard photometric filter set required for scientifically
consistent and comparable measurements.
In progress
Baader MPCC Mark III
Coma correction module for improved field uniformity and
more stable photometric quality across the frame.
In progress
ZWO EAFN Auto Focuser
Temperature-aware autofocus module for focus stability
during repeatable long-duration observing sessions.
In progress
Mini PC (Intel N100 class)
Dedicated observatory-side computer for INDI, KStars,
remote control, and automation pipeline operation.
In progress
Lunatico AAG CloudWatcher
Autonomous cloud and sky condition monitoring system
required for safe unattended robotic operation.
Completed
2 modules: telescope and mount/controller platform.
In progress
7 modules remain to complete the operational hardware chain.
Current readiness
22% of key hardware modules completed.
Equipment support and shipment
Recipient: Dmitry V. Klimov
Region: Kaliningrad Region, Russia
Shipping details: provided upon request
Contact: d.klimov.psi@gmail.com
Please contact before purchase or shipment to confirm compatibility,
current priority, and delivery details.
What support enables
Completing the KTRO hardware chain enables a transition
from experimental setup to a stable observational system.
True photometric measurements
A cooled monochrome camera with calibrated filters enables
scientifically consistent differential photometry,
instead of qualitative observations.
Reproducible observing sessions
Automated filter switching, autofocus, and stable control
allow identical observing conditions to be repeated
across nights and seasons.
Fully automated operation
Integration of Mini PC, OnStep control, and environmental
monitoring enables unattended robotic observing cycles
with remote supervision.
Environmental awareness
CloudWatcher provides real-time sky condition assessment,
allowing safe operation and consistent data quality control.
Stable data pipeline
A complete acquisition → calibration → reduction chain
ensures traceable and reproducible data products.
Public observational dataset
The completed system enables structured long-term datasets
that can be published and used for independent analysis.
System Architecture
KTRO is designed as a complete observational chain:
from optical acquisition and instrument control
to calibrated data reduction and public publication.
Optical system
Sky-Watcher 150/750 telescope → Baader MPCC Mark III →
ASI533MM Pro camera → 2" filter wheel → autofocus module
Mount and control
MaxVision EXOS-2 mount → OnStep V4 Pro controller →
pointing, tracking, and repeatable motion control
Observatory-side computing
Mini PC → INDI / KStars / automation scripts →
session control, device coordination, and monitoring
Environment and connectivity
Lunatico AAG CloudWatcher → sky-state monitoring →
4G communication link for remote supervision and control
Pipeline
Acquisition → calibration frames → reduction pipeline →
quality checks → reproducible processed outputs
Data publication
Final data products → documentation → GitHub repository →
public archival availability where feasible
System flow
Telescope + Camera Chain
→
Mount + OnStep
→
Mini PC
→
CloudWatcher + 4G Link
→
Reduction Pipeline
→
GitHub / Public Data
The architecture is intentionally compact: each subsystem serves
reproducibility, remote operability, and traceable data flow.
Observational site
Rural site selected for controlled, repeatable observational conditions.
Sky quality
Bortle class 4–5 (estimated)
Conditions
Low light pollution, stable horizon, suitable for long-term monitoring.
Approximate location shown.
Reproducibility Policy
All data products will be made publicly available where possible.
All observational procedures are:
- documented
- version-controlled
- pipeline-reproducible
- archivable
The program is methodological and complementary to
professional observatories.
It aims to explore response diagnostics and stability structure
under controlled small-scale conditions.
Status Summary
Current status: Phase 2 — semi-automation development
Hardware readiness: 22% complete
Completed modules: telescope; mount and controller
Priority: camera, filters, automation, weather monitoring
Structured long-term monitoring campaigns are planned
for the sky conditions of the Nemansky region.